
Résumé:
normes de particules pour filtre ŕ particules en utilisant la fonction d'importance sous-optimale causé une dégradation, un filtre ŕ particules améliorée optimisation papillon algorithme. algorithme d'optimisation du filtre ŕ particules par processus d'échantillonnage d'importance papillon, de sorte que les particules loin de l'état réel de l'état réel de la possibilité de se déplacer une grande surface. algorithme de filtre ŕ particules optimisé pour augmenter l'effet des particules, évitant problčme d'optimisation locale. Les résultats de simulation montrent que le filtre ŕ particules d'optimisation classique et le groupe de particules du filtre ŕ particules par rapport au filtre ŕ particules sont optimisés variance d'erreur, a réduit significativement le nombre de particules requise inférieure ŕ un filtre ŕ particules classique, d'améliorer la dégradation des particules problčmes, améliorer la précision de filtrage.
format de citation chinois: . Filtre ŕ particules Liu Yuntao papillon algorithme d'optimisation [J] basé sur la technologie de l'information et la sécurité du réseau, 2018,37 (7): 37-41.
0 introduction
Filtre ŕ particules est un état non gaussienne non linéaire pensé procédé de filtrage estimation de Monte Carlo [1], a atteint un certain effet dans le domaine pertinent de l'application de diagnostic de défaut, le suivi de la cible. Hua et al segment de coupe [2] a proposé la méthode de diagnostic de panne de capteur de robot mobile sur la base de filtre ŕ particules, et vérifié que le procédé peut identifier le dysfonctionnement d'un ou plusieurs robots mobiles. Cheng Jian et al [3] La théorie du filtre ŕ particules utilisé dans le suivi de cible infrarouge dans la théorie du cadre du filtre ŕ particules, la cible infrarouge distribution de probabilité a posteriori de l'échantillon aléatoire est représenté par un ensemble pondéré d'échantillons aléatoires par évolution bayésienne itérative pour atteindre la cible infrarouge suivi. Cependant, avec l'augmentation du nombre d'itérations, particules lourdes de plus en plus la variance de poids important, ce qui rend le poids de la particule de se concentrer sur un trčs petit nombre de particules, les poids d'importance des autres particules seront petites, c'est la dégradation des particules. DOUCET A et al. [4] de la théorie ŕ prouver le caractčre inévitable des phénomčnes de dégradation des particules. la dégradation des particules affecte gravement la précision du filtre ŕ particules.
Pour des problčmes de dégénération de particules du filtre ŕ particules, les chercheurs nationaux et étrangers ont fait beaucoup de recherches. Zhang Qi et al [5] ont proposé des poids de filtres ŕ particules de l'algorithme en fonction de la valeur sélectionnée. Granulométrique choisie en fonction du poids des particules est de préférence utilisé pour la filtration, afin d'augmenter la diversité de l'échantillon, ce qui atténue filtre ŕ particules de dégradation. Xia Fei et al [6], la valeur ŕ l'une sorte de poids triées rééchantillonnage, la survie du plus apte algorithme de ré-échantillonnage, l'arrangement des poids normalisés de chaque particule dans l'ordre croissant en fonction du poids et de la taille des particules de variance-out , en obtenant ainsi un meilleur algorithme de filtrage de particules pour résoudre le problčme de la dégradation du filtre ŕ particules standard ŕ une certaine mesure. Cependant, ces deux méthodes sont toujours basées sur la base de sondage traditionnel, il n'a pas réussi ŕ résoudre le problčme de la dégradation des particules.
algorithme de papillon (papillon algorithme, BA) est une sorte de ARORA S et S SINGH [7] a proposé le comportement de recherche de nourriture papillon algorithme d'optimisation globale. La simulation indique que l'algorithme est supérieur ŕ un autre algorithme heuristique naturelle, par rapport ŕ un autre algorithme a une plus grande précision de convergence et une convergence plus rapide. Inspiré par cet algorithme, ce papier est introduit procédure d'échantillonnage Filtre ŕ particules algorithme d'optimisation de papillon, et vérifiées par le papillon d'optimisation de simulation particules élémentaires peuvent améliorer les particules de filtre d'algorithme de filtre ŕ particules présentent une dégradation.
Un filtre ŕ particules
filtrage des particules d'estimation bayésienne [8] basée sur idée de Monte-Carlo. Supposons que le modčle d'espace d'état non linéaire du systčme:

Dans lequel f (·) et h (·) équation d'observation et de l'équation de transition d'état, respectivement. xt des variables d'état du systčme ŕ l'instant t, la valeur observée ZT pour l'heure du systčme t, poids et vt est indépendant du bruit, respectivement, le bruit de processus et de bruit d'observation du systčme, l'UT d'entrée du systčme ŕ l'instant t.
Aprčs avoir calculé le filtre postérieur est la densité de probabilité filtré p (xt | z1: t), la p connue (xt | z1: t) p (x0: t | z1: t), le bord de densité de probabilité. Supposons que le temps t 1-filtrer la densité de probabilité p (xt-1 | z1: t-1) est connu, l'état du systčme du premier ordre de traitement de sujet de Markov xt et zt systčme observation indépendante. Par la formule suivante

Le systčme comprend un état obtenu ŕ l'instant t l'instant t 1 observé densité valeur de probabilité a priori p (xt | z1: t-1):

De formule (3) est le processus de prédiction, oů p (xt | xt-1) est la densité de probabilité de transition d'état. En utilisant la valeur d'observation ŕ l'instant t zt, en mettant ŕ jour le p de correction (xt | z1: t-1), obtenu densité de probabilité a posteriori de l'état du systčme ŕ l'instant t p (xt | z1: t), Bayes théorčme peut ętre obtenu ŕ partir de l'état de mise ŕ jour équation:

parmi

Toutefois, pour les non-linéaire et non-gaussienne, le procédé de formule (3) et (4) l'élimination des paramčtres de variables intermédiaires calculées ailleurs et trčs difficile, il est difficile d'obtenir une telle fonction de densité de probabilité exprimant l'expression analytique complčte. Ainsi, le filtre ŕ particules en utilisant des procédés d'échantillonnage de Monte Carlo séquentielles, la densité p (xt | z1: t) échantillonné ŕ partir de la probabilité postérieure d'un grand nombre de points d'échantillonnage pour approcher une distribution aléatoire ŕ estimer, ces points sont appelés particules aléatoires de l'échantillon. Avec de grandes particules pour approcher la distribution postérieure de l'ensemble, lorsque le nombre de particules est suffisamment grand, la distribution postérieure peut ętre approchée avec précision, il est une approximation globale de filtre optimal. Supposons que le p de densité de probabilité postérieure (xt | z1: t) échantillonné N particules, l'approximation de la densité de probabilité a posteriori peut ętre représenté par la formule suivante:

Dans lequel, xit désigne des particules de l'échantillon ŕ partir de la densité de probabilité postérieure, (·) représente la fonction delta de Dirac.
Mais il est difficile dans la pratique de la fonction p |: échantillonnage (xt z1 t). Peut commencer avec une distribution de référence déjŕ connu et facilement échantillonnée q (xt | z1: t) sont échantillonnés par q (xt | z1: t) des échantillons pondérés de rapprocher les particules x p (xt | z1: t ). Lors de la sélection densité de probabilité significative

, L'importance de la variance de poids minimum, cette fois ŕ l'importance de la densité optimale de probabilité. équation de calcul de poids:
Dans la formule (8), p (zt | xit-1) ne peut pas ętre résolu, il est plus courant est l'importance de la sélection d'une densité de probabilité de densité de probabilité a priori, qui est,

Formule simplifie

L'importance du poids normalisé, qui est,

Ensuite, la densité de probabilité postérieure peut ętre exprimée sous la forme:

Dans lequel, les poids d'importance de formule (11) représentés sur la figure. Lorsque le N vu de la loi des grands nombres, la formule (12) est approchée vraie probabilité postérieure p (xt | z1: t).
Filtre ŕ particules papillon Optimisation 2
2.1 algorithme papillon
Butterfly est un algorithme heuristique naturel algorithme d'optimisation globale, l'idée principale est similaire au comportement de recherche de nourriture groupe papillon, chaque papillon parfumera une certaine force, tandis que chaque papillon se sentira le parfum autour d'autres papillons, et vers un mouvement qui émette papillon plus parfumé. parfum papillon dépend de trois facteurs: la forme perçue, la force et la puissance de l'indice de stimulation. Comme exprimé par l'équation
F = Cia (13)
Lorsque, F représente la concentration du parfum dans la taille, la forme c est perçue, I est l'intensité de stimulation, a est un exposant.
fonction objectif connu f (x), l'algorithme papillon étapes de base est la suivante:
populations de papillon (1) avec n initialisé seulement papillon, (xi) est déterminée uniquement par la fonction objective f pour chacun des papillons intensité de stimulation xi Ii.
(2) ne calculé pour chaque papillons de fitness populations de papillons et de trouver la position optimale du papillon.
(3) Calculer les papillons émettent parfum. En raison de l'interférence de l'environnement extérieur, la génération d'un nombre aléatoire p pour déterminer le papillon est toujours la recherche locale recherche globale.
(4) Si la recherche mondiale, papillons qui volent plus haut condition physique générale des papillons, la recherche globale peut ętre exprimée en

Oů, xt + 1i du i-ičme vecteur de solution papillon dans le t-ičme itération. g * représente la solution optimale actuelle dans tous les papillons.
(5) Si la recherche locale, conduite papillon vol au hasard Lévy. Recherche locale peut ętre exprimée en


Afin d'éviter de tomber dans le mobile local papillon optimale, vol introduit dans l'Lévy algorithme, l'essence de vol Lévy est marche aléatoire, étape en ligne avec la répartition de la distribution de probabilité lourde ŕ queue:

vol lévy peut accélérer la recherche locale pour améliorer l'efficacité de la recherche. Ici, est dans la plage de (1,2].
2,2 algorithme fusion et filtre ŕ particules papillon
Dans l'algorithme, le papillon, le papillon est considéré comme particules filtrantes des particules peut ętre vu qu'il y a certains papillons de similarité et de l'algorithme filtre ŕ particules. Tout d'abord, l'algorithme papillon papillon mise ŕ jour en permanence leur position afin d'adapter au plus haut degré de papillons voler, similaire aux particules d'algorithme filtre ŕ particules continuent d'approcher le véritable état de la partie postérieure du systčme de distribution de probabilité. En second lieu, l'algorithme de papillon pour adapter au plus haut degré de papillons est la meilleure valeur de la population, similaire au filtre ŕ particules dans l'importance d'avoir le plus grand poids de la particule est plus susceptible d'ętre dans la vraie distribution a posteriori.
Cet article présentera l'idée de l'algorithme d'optimisation des processus d'échantillonnage du filtre ŕ particules papillon, pour améliorer le filtre ŕ particules de performance. Mais si l'algorithme d'optimisation des papillons directs combiné avec un filtre ŕ particules, peut causer de nombreux problčmes, de sorte que l'introduction de papillons de processus d'optimisation de l'algorithme de filtre ŕ particules ŕ effectuer les changements suivants:
(1) l'importance de la densité de probabilité du filtre ŕ particules classique est choisie une densité de probabilité a priori, la perte des observations actuelles de temps, afin de profiter des derničres observations dans le calcul du temps d'adaptation ŕ la valeur du papillon. Par conséquent, la valeur de papillon équation de définition adaptée ŕ:

Ce qui, Rk est la variance du bruit de mesure, znew est les derničres observations, les observations ZPRED indiquent prédit.
(2) pendant le déplacement des papillons, chaque papillon sont actuellement connus approche ŕ la valeur optimale. Dans l'algorithme de recherche globale en papillon équation g * -xti ont déterminé la direction du mouvement du papillon, mais lorsque le vol Lévy est négatif, mais le papillon se déplace dans la direction opposée, vers la valeur optimale, ce qui invalide double comptage. Par conséquent, pour faire face ŕ la valeur absolue de vol Lévy. L'amélioration de l'équation de recherche globale devient:

(3) Dans l'équation de recherche globale (18) papillons algorithme de recherche locale et l'équation (15), lorsque la valeur de vol Lévy est trop petite conduira Fi et papillons position de base ne se déplace pas, ce qui entraîne une mise ŕ jour de l'emplacement non valide. Lorsque les papillons sont mis ŕ jour petit déplacement nécessaire pour l'expansion correcte de la situation réelle.
En résumé, l'introduction du filtre ŕ particules (BA-PF) Papillons algorithme d'optimisation spécifique pour atteindre les objectifs suivants:
(1) l'initialisation. Sélectionnez importance de probabilité a priori en fonction de densité de probabilité générée ŕ partir des particules de composés de N fonction d'importance

(2) la prédiction. (1) l'état est calculée par la formule


(3) pour trouver la valeur optimale. La particule filtrer chaque particule considérée comme un algorithme de papillon du papillon. Par remise en forme (17) calcule la valeur de la fonction d'aptitude pour chaque type de particule, et le g global de particule optimale par la formule (19) *, ŕ savoir, le papillon de la valeur de condition physique maximale.

(13) calculer (4) en utilisant une formule pour chaque particule d'arôme Fi, est utilisé génčre un nombre aléatoire r de particule déterminée en utilisant la formule (18) de recherche globale ou en utilisant la formule (16) de recherche locale. Lorsque le nombre d'itérations atteint le nombre maximum de M, itération arręt.
(5) mettre ŕ jour l'importance d'optimiser le poids de la particule et normalisée.
(6) rééchantillonnage. Si inférieur au seuil de l'échantillon de particule efficace efficace Neff Nth, ŕ savoir

Lorsque rééchantillonnage est effectué. Obtenez un nouvel ensemble de particules

.
(7) estimation d'état. utilisation

Estimation d'état.
(8) algorithme pour déterminer si continuer, si elle se poursuit, le retour ŕ l'étape (2), sinon les extrémités de l'algorithme.
3 Résultats et discussion
environnement matériel expérimental pour les ordinateurs portables (le processeur d'Intel Core, 16 Go de mémoire), un environnement logiciel expérimental Matlab 2016A. Pour vérifier le filtrage de particules amélioré, algorithme filtrage particulaire pour optimiser le papillon (BA-PF) et un filtre ŕ particules classique (PF) et la comparaison sur la base de filtre non parfumé Kalman optimisé filtre ŕ particules (l'UPF), du papier, [9] des équations d'état et de mesure du systčme non linéaire, le systčme est le suivant:

Dans lequel 1 = 0,5, 2 = 0,2, 3 = 0,5, = 0,04, le bruit de processus en poids ŕ Gamma (3,2) Bruit de gamma, du bruit de mesure v prise de moyenne nulle et de variance du bruit gaussien 0,0001. algorithme de modčle Trois types ŕ l'estimation et le suivi non linéaire de l'état du systčme. Pour mesurer la racine performance moyenne d'erreur quadratique de chaque filtre ERMSE. RMSE formule est la suivante:


les valeurs des paramčtres d'algorithme expérimentaux de la référence sont représentés dans le tableau 1.

Simulation d'un nombre différent de particule N = 20, N = 40, N = 100 et la précision de filtration trois types de filtre ŕ particules d'exécution sont comparées, comme indiqué dans le tableau 2. La figure 1 est un nombre de particules primaires N = les conditions de simulation sous-estimation de l'état séparé de trois types de filtre ŕ particules 20, correspondant ŕ. La figure 2 est une simulation de trois filtres ŕ particules valeur absolue de l'erreur d'estimation.

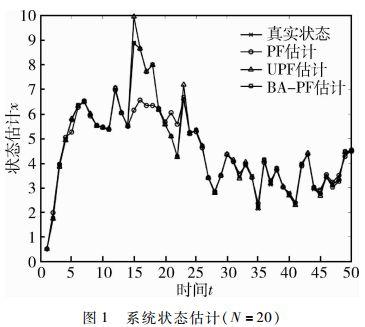

Figure 1, Figure 2 et le tableau 2, on peut voir, la RMSE algorithme BA-PF est significativement moins que les algorithmes algorithme PF et FPU, algorithme BA-PF peut ętre filtré avec une grande précision dans un petit nombre de particules, ceci est principalement parce que l'algorithme BA-PF est capable d'entraîner une forte probabilité de vraisemblance des particules non valides se déplacent vers la zone et ŕ améliorer l'effet des particules. Lorsque l'algorithme PF pour petit nombre de particules, l'estimation d'état facilement perdre, par exemple ŕ partir d'un point dans le temps t = 16 t = 22. Depuis l'introduction du filtre de Kalman FPU unscented, le filtre algorithme PF est améliorée par rapport ŕ l'exactitude, la précision du filtre, mais en dessous de l'algorithme BA-PF.
Afin de tester la robustesse de différent filtre ŕ particules, un émulateur séparé 40 ŕ l'instant t = 45 et t = état de consigne de cadencement mutant se produit, une amplitude de 15. 3 est le nombre de particules N = 20 et les trois types de mutations filtre ŕ particules résultat d'estimation de l'état,. La figure 4 est une erreur d'estimation correspondante de la valeur absolue de trois types de filtre ŕ particules. En outre il ressort du tableau 2, l'algorithme temps d'exécution BA-PF légčrement au-dessus de l'algorithme PF, mais beaucoup plus faible que le temps d'exécution de l'algorithme UPF.


Les figures 3 et 4, on peut voir en fig. T = 40 et t = 45, la valeur de la transition d'état se produit, et les estimations de l'algorithme algorithme PF UPF ont subi des écarts significatifs, parmi lesquels le plus algorithme évident de PF. algorithme BA-PF et l'introduction de vol Lévy aléatoire, ce qui évite le problčme de l'optimum local, aucun écart significatif se produit, ce qui indique l'état du systčme mutation adaptative algorithme BA-PF forte, les algorithmes de grande robustesse. En résumé, puisque l'algorithme BA-PF en importance papillon optimisation des processus d'échantillonnage, d'améliorer la dégradation des particules, améliorant ainsi la précision du filtre.
4 Conclusion
Dans cet article, l'algorithme d'optimisation de filtre ŕ particules sur la base du papillon, le papillon est introduit processus d'optimisation de l'algorithme d'échantillonnage importance d'un filtre ŕ particules classique, les états d'attaque des particules ŕ l'extérieur de l'état réel de la possibilité réelle de se déplacer une grande surface, ce qui améliore effectivement la présence du filtre ŕ particules la dégradation des particules, ce qui améliore la précision de filtration du filtre ŕ particules. Alors que l'algorithme BA-PF évite le mode de recherche locale optimale en commutant le papillon et aléatoire vol Lévy. Les résultats expérimentaux montrent que l'algorithme BA-PF dans le cas d'un petit nombre de particules peut atteindre un filtrage efficace, le filtre a de meilleures performances que l'algorithme PF, l'algorithme haute robuste.
références
[1] PARK S, HWANG J P, KANG H J, et al Un nouveau filtre ŕ particules pour la prévention de l'évolution de l'appauvrissement de l'échantillon [J] IEEE Transactions on Evolutionary Computation, 2009, 13 (4): 801-809 ...
[2] section de coupe chinoise, CAI Zi-xing ŕ Jinxia, un autre diagnostic de panne du capteur de navigation par inertie [J] robot mobile basée sur les filtres de particules Central South University (sciences naturelles), 2005, 36 (4): 642-647.
[3] Cheng Jian, Zhou Yue, Cai lecture, telles que le suivi de cible infrarouge sur la base de filtre ŕ particules [J] Journal of ondes infrarouges et millimétriques, 2006, 25 (2): 113-117.
[4] DOUCET A, GODSILL S, C. ANDRIEU sur les méthodes d'échantillonnage de Monte Carlo pour le filtrage bayésien [M]. Kluwer Academic Publishers, 2000.
[5] Zhang Qi, ROCKETS Qiaoyu Kun Filtre ŕ particule algorithme basé sur le poids sélectionné [J] et des décisions de contrôle, 2008, 23 (1): 117-120.
[6]. Shafer HAO maître Tao, Hao, etc. Filtre ŕ particules Turbine amélioration du diagnostic de défaut [J] Computer Measurement & Control, 2016, 24 (1):. 35-38.
[7] ARORA S, SINGH S. algorithme papillon avec LEVY vols pour l'optimisation globale [C] Conférence .International sur le traitement du signal, calcul et contrôle IEEE 2016 :. 220-224.
[8] GORDON N J, J SALMOND D, F A SMITH M. nouvelle approche pour estimation bayésienne non linéaire / non gaussienne état [J] IEE Proceedings F - Radar and Signal Processing, 2002, 140 (2) :. 107-113.
[9] DOUCET A, D FREITAS N, WAN E. Le filtre ŕ particules non parfumé [C] Neural Information Processing Systems, SPNI, 2001 :. 584-590.
A propos de l'auteur:
Liu Yuntao (1991-), mâle, maître, principales directions de recherche: systčmes embarqués, l'intelligence artificielle.
Offres d'emploi

Renseignements sur la formation
Vous pouvez également cliquer sur l'URL d'accčs

