En 1966, les États-Unis ont publié de science-fiction film « fantastique Journey », plusieurs sous-marins de médecins américains sera réduit ŕ de plus petites que les globules rouges, les vaisseaux sanguins et ŕ travers elle dans le cerveau pour éliminer les caillots de sang bloquant le cerveau, finalement sauvé avec succčs des sciences de la vie.
De ce film, on peut voir que, avec le concept de traitement des micro-robots déjŕ apparu. Dans le passé, cette idée ne peut apparaître dans la science-fiction, mais avec le développement de la technologie, des micro-robots implantés dans le corps de l'imagination pourrait bientôt devenir réalité.
L'avenir proche, quand on voit un médecin ŕ l'hôpital, les médecins prescrivent la médecine et la chirurgie n'est pas nécessaire, mais ŕ notre injection de corps robots miniatures. Le robot peut marcher librement ŕ travers le corps humain, et dégager la plaque de l'artčre bloquée, une biopsie ou ŕ l'intérieur du traitement du cancer et des tumeurs.
défi « Petit »
La taille et les cellules humaines de micro-robot médical presque idéal, par rapport ŕ un traitement médical traditionnel, tels que: la chirurgie et l'hémodynamie, etc., presque robots miniatures ne causera pas de dommages aux tissus humains. In vivo en ciblant une cible spécifique, l'orientation de l'administration, le micro-robot permet de réduire considérablement les effets secondaires.
Bien que les avantages du lot micro-robot médical, mais vraiment il est pas si facile ŕ réaliser. La plus grande différence entre le micro-robot de traditionnel et le robot est que leur taille est trčs petite. Taille « Small » est une épée ŕ double tranchant, en męme temps apporte des avantages, elle apporte aussi de sérieuses limites. Il peut ętre injecté dans le corps humain du volume de la micro-robot est trop petit pour ętre facilement intégré dans toute la puissance, le circuit de capteur ou d'un ordinateur. Certains grands robot a des caractéristiques telles que: l'intelligence artificielle et la capacité athlétique, micro-robots sont difficiles ŕ avoir. On imagine le début du sous-marin miniature, avec la cellule de la taille du moteur ne peut ętre installé sous-marin, l'hélice sous-marine aussi inutile, mais aussi pour la protection des tissus humains, l'entraînement mécanique traditionnel (comme sous-marine hélice) ne peut pas ętre appliquée dans le corps du robot. Dans l'épaisseur du sang, comment le sous-marin avant de devenir le plus gros problčme.

En outre, dans une petite échelle, par rapport ŕ la surface de l'effet est plus évidente, ce qui limite encore davantage le mouvement des micro-robots. Tout objet a un volume et de surface, la surface au rapport de volume est trčs important. En général, plus l'objet, plus ce rapport. Ainsi, ŕ l'échelle microscopique, la surface est proportionnelle ŕ l'effet (tels que la résistance de l'air) l'impact de plus, les effets associés au volume plus petit (tels que la gravité et inertie) rôle. Ainsi, certains insectes petit volume, surface et la taille relativement importante, ils peuvent ętre en toute sécurité chute d'une hauteur, car une plus grande résistance ŕ l'air réduite des insectes d'impact, donc, quand ils finissent par tomber la vitesse sera grandement réduite.
En plus des défis posés par les petits, biodégradables robot micro-biologique et biocompatible également un facteur clé. Parce que les petits corps étrangers ne doivent pas rester dans le corps de façon permanente afin qu'ils ne causent pas de réactions immunitaires sévčres, de sorte que tout matériel qui entrent dans les besoins du corps ŕ une sélection rigoureuse.
Activé micro-robots
Les défis, les scientifiques ont mis au point une grande variété de méthode d'activation des robots miniatures. Le premier est le conducteur d'ondes acoustiques, des oscillations d'insonation du liquide entourant le micro-robot, provoquant une pression différents liquides localisées sur les deux côtés des micro mouvements du robot. Une autre conduite chimique, ce procédé utilisant le micro-bulle générée par une réaction chimique pour fournir la propulsion.
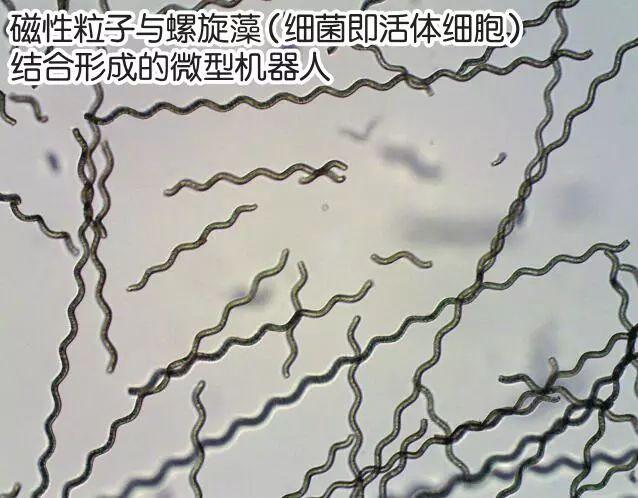
Les cellules vivantes d'énergie autonome et la mobilité peut également fournir de l'énergie pour un micro robot, par exemple: certaines cellules musculaires bactériennes et autres. Les ingénieurs peuvent se lier ŕ des cellules vivantes de micro-dispositif artificiel ensemble, ils sont commandés ŕ distance en faisant varier la température, l'acidité et les conditions de lumičre ambiante et analogues. Cependant, le problčme avec cette approche est qu'il ne peut ętre utilisé dans un environnement contrôlé, et les changements environnementaux dans le corps humain ne peut pas ętre trop grand.
La forme la plus populaire de robot d'entraînement magnétique. un matériau magnétique incorporé dans l'ingénieur de robot manipulant ensuite micro-robot par un champ magnétique externe. Afin de produire des ingénieurs de champ magnétique plus gros aimant mobile ou une bobine électromagnétique placée ŕ l'extérieur du corps humain, le champ magnétique peut ętre tout ŕ fait sans danger pour le corps humain. Et en changeant la direction du champ magnétique ŕ gradient, une force sera appliquée micro-robot et le couple (couple de l'objet en rotation se produit), en le déplaçant le long d'une trajectoire souhaitée, et change la direction du gradient de champ magnétique détermine le mouvement de la micro-robots.
En rotation, glissement et de roulement
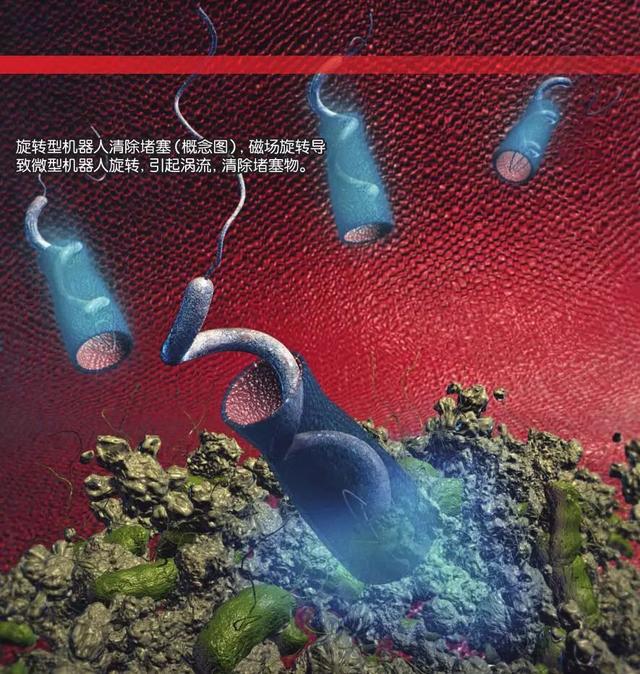
En plus de l'activation du micro-robot, le mouvement de l'essai micro-robot varient également. Comme la plupart environnement humain est un liquide, il doit avoir la capacité de micro-robot mobile dans un environnement fluide. Certains chercheurs de trouver des solutions de nature, et a noté que de nombreux microbes sont l'utilisation de flagelles (ont une longue fonction motrice chez certaines bactéries filaments de protéine bactérienne subsidiaire) pour se promouvoir. Dans flagellaire hélicoďdal conçu ŕ base de micro-robot entraîné par un champ magnétique tournant, la męme mesure que la rotation de la vis sans fin. Cependant, le mouvement de rotation approprié milieu liquide, le corps humain ne convient pas ŕ la surface adhésive rugueuse (telle que la muqueuse gastrique).
La façon la plus courante consiste ŕ utiliser un exercice pour que le champ magnétique ŕ gradient magnétique de gradient de glissement micro robot sera tiré vers la zone d'objet magnétique plus fort. Cependant, sur la surface rugueuse se glisser sous l'action d'un gradient magnétique étant une grande résistance, tels que la force de frottement. Ainsi, tout en glissant dans le laboratoire a fait un bon travail, ne convient pas pour des applications pratiques.
Il roule aussi (inversion) de l'exercice et ainsi de suite. Depuis peut ętre utilisé le champ magnétique rotatif pour faire tourner la flagelles artificielle, il peut également ętre utilisé pour faire pivoter l'objet dans un bloc mince. Fabriqué par la croissance d'un micro-robot mince de blocs soumis ŕ un couple d'aimants, est inversée, lorsque le frottement entre la surface de contact d'un côté de la micro-robot, de sorte que ce côté fermement « saisir » la surface d'un côté, ŕ la bascule avant, micro robot a commencé ŕ aller de l'avant. Par ce mouvement, le micro-robot peut librement vers l'avant dans la surface de l'estomac en forme de caniveau.

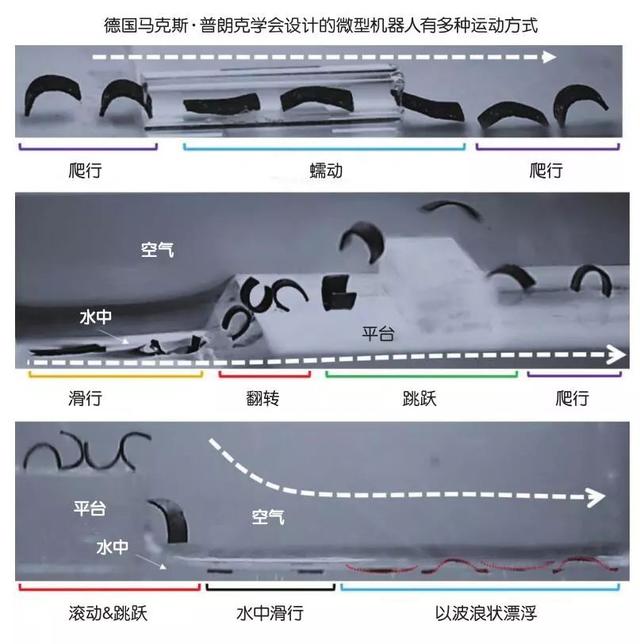
Des robots miniatures peuvent avoir ŕ la fois un mode sport, vous pouvez aussi avoir une variété de mouvement. Par exemple, en 2016, ETH Zurich, Suisse chercheurs sur l'utilisation d'hydrogels et des nanoparticules magnétiques biocompatibles créer un robot micro spirale qui, dans le champ magnétique, dans un milieu liquide, la rotation aller de l'avant. Et en 2018, la Max Planck Société allemande pour la conception de robots miniatures capables de rouler ŕ la fois sur une surface inégale, sauter ou ramper, mais aussi la natation dans un milieu liquide. De męme le robot micro spirale, les particules magnétiques miniatures de robot noyées dans une longueur de seulement quatre millimčtres (moins de la moitié de la largeur d'un ongle) silicium élastique, le mouvement du robot est commandé par un des chercheurs de champ magnétique externe.
Groupes en coopération avec la mission
Afin de micro-robot a un meilleur effet de l'application, un groupe de scientifiques dans l'espoir de faire ensemble le travail du robot, tout comme la colonie de fourmis. Par exemple, plusieurs robots miniatures travaillant ensemble, peuvent transporter plus de médicament dans le corps. Toutefois, pour parvenir ŕ une coopération micro-robots se heurte encore ŕ des défis, et maintenant la technologie de contrôle de champ magnétique seul ne peut commander le mouvement du robot, respectivement, sont soumis ŕ tous les robots avec un grand contrôle de champ magnétique. Ŕ l'heure actuelle, les scientifiques étudient ŕ petite échelle micro-électromagnétique axée sur la technologie, l'espoir dans l'avenir ętre en mesure de contrôler une pluralité de coordination micro-robots.
Lorsque nous sommes en mesure de contrôler parfaitement et micro-robots mobiles, les défis de la prochaine étape est de permettre au robot d'effectuer une variété de tâches complexes. Ŕ l'heure actuelle micro-robot ne peut faire quelques mouvements simples, comme pousser, attraper des objets. Afin de compléter la mission médicale attendue, la capacité ŕ utiliser des robots miniatures doit ętre soulevée.
Avec les progrčs de la technologie de miniaturisation, dans le pas trop lointain avenir, une équipe de robots miniatures va nager dans les vaisseaux sanguins, d'explorer tous les coins du corps, et dans les médicaments de transport routier, les cellules de réparation.